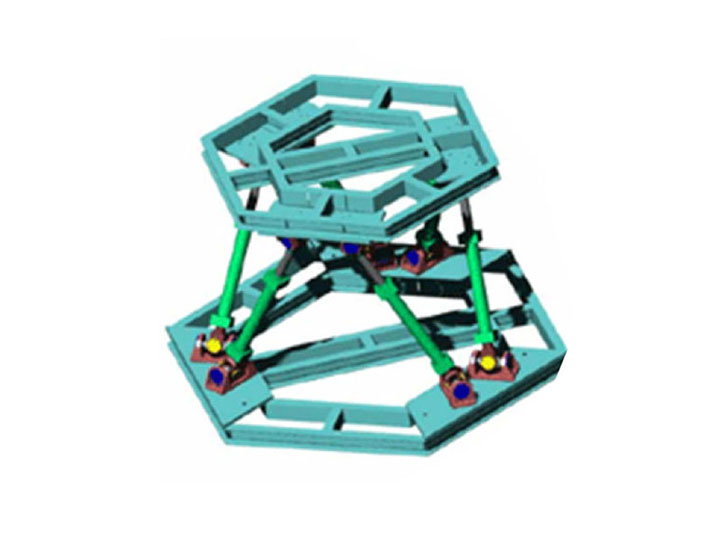
六軸聯動平臺可表現六個自由度的運動模式運動平臺主要由三大部分所構成:機械結構、控制法則及運動效能。以機械結構來說,動作平臺的基本結構可從單軸到六軸,一般較常見的有三軸及六軸。隨著機械結構設計不同,也間接影響平臺的運動性能,如平臺的運動自由度、承載重量、運動角度等等。一般稱平臺的運動方式叫自由度,所謂的自由度是指在三維的坐標系統中,分別對X、Y、Z軸做平移動作,那就會分別得到水準平移、垂直平移及上下平移三個自由度;如果再加上分別對X、Y及Z軸旋轉的動作,那將再增加搖滾、俯仰及扭轉三個自由度。在自然界中,基礎的運動模式都可用此六個自由度結合而模擬表示。因此一個三個自由度的動作平臺意指六個運動方式中可做三種,如Heave、Roll及Pitch;通常六軸的動作平臺就可做到上述的六種運動方式。
The six-axis linkage platform can represent six degrees of freedom of motion mode motion platform is mainly composed of three major parts: mechanical structure, control law and motion efficiency. In terms of mechanical structure, the basic structure of the action platform can range from single axis to six axis, generally more common three axes and six axes. With the different mechanical structure design, it also indirectly affects the motion performance of the platform, such as the freedom of movement of the platform, carrying weight, motion angle and so on. Generally known as the platform's mode of motion is called degrees of freedom, the so-called degrees of freedom refers to the three-dimensional coordinate system, respectively, the X, Y, Z axis to do flat movement, it will be horizontal translation, vertical translation and upper and lower translation of three degrees of freedom, if you add the rotation of the X, Y and Z axes, it will increase rock, pitch and twist three degrees of freedom. In nature, the underlying motion patterns can be represented by this combination of six degrees of freedom. Thus, a three-degree-of-freedom action platform means that three of the six modes of motion can be done, such as Heave, Roll, and Pitch.